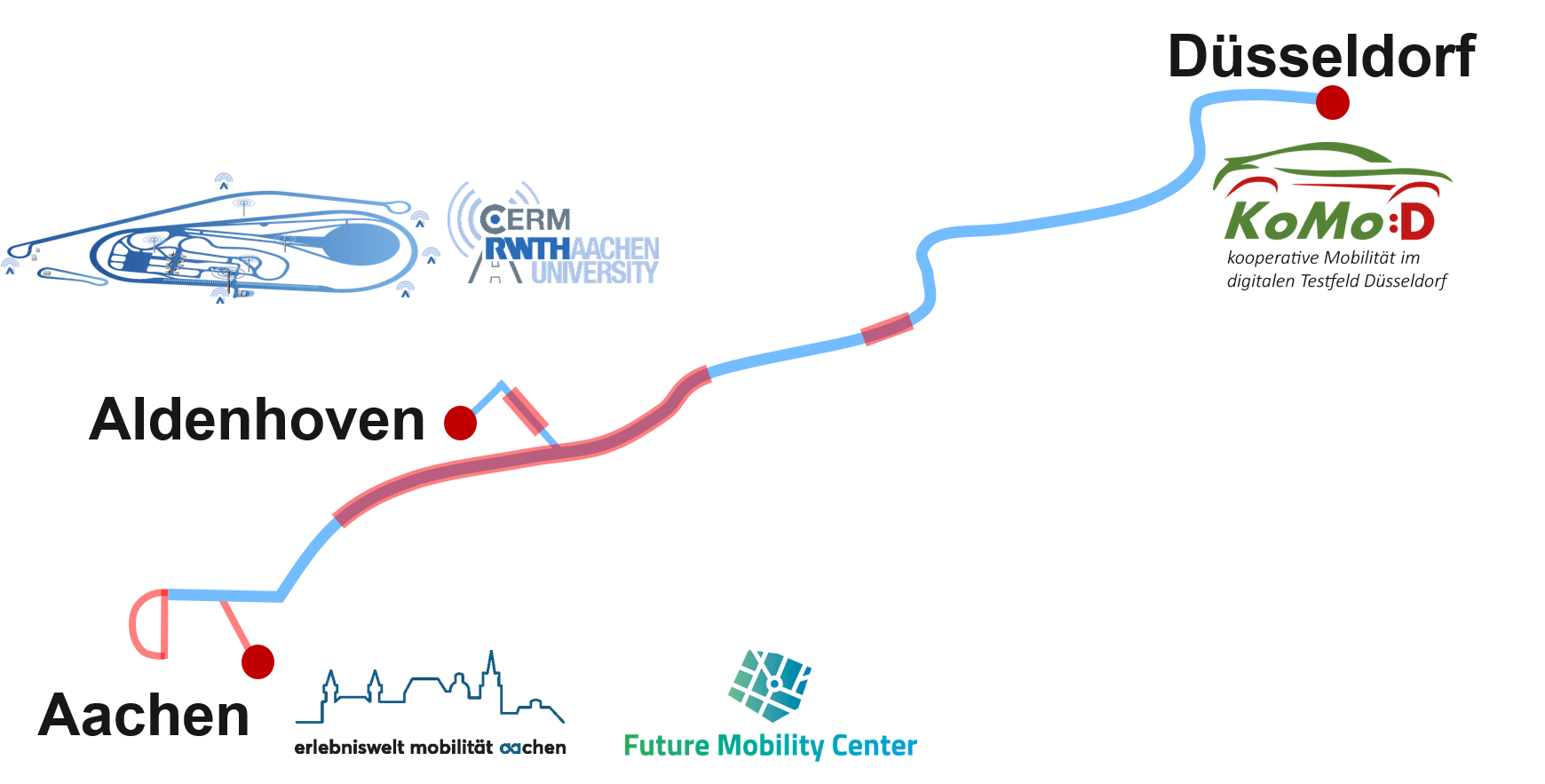
Im Projekt „ACCorD – Korridor für neue Mobilität Aachen - Düsseldorf“ wird eine Testumgebung für automatisierte Fahrzeuge geschaffen, die bestehende Testfelder in Düsseldorf und Aldenhoven verbindet und die Abbildung vielfältige Testszenarien ermöglicht. Die im Testkorridor erfassten Daten werden in einer zentralen Datenbank verarbeitet und zur Implementierung eines digitalen Zwillings des Testfelds genutzt.
Automatisierte Verkehrsmittel
Die Automatisierung des Verkehrs bietet große Chancen in Bezug auf Sicherheit und Effizienz. Doch auf dem Weg dorthin warten noch viele Herausforderungen.
- Verkehrsträger: Straße
- Themenfelder: Automatisierte Verkehrsmittel, Konnektivität, Verkehrsmanagement, Innovative Verkehrsinfrastruktur
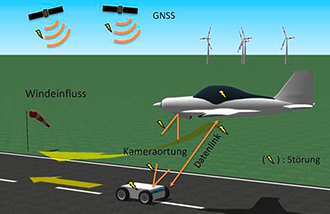
Im Projekt „ReCo – Rendezvous Control, Automated landing of a fixed-wing aircraft without landing gear on a moving vehicle“ wird die automatisierte Landung von Flächenflugzeugen auf einem bodengebundenen Fahrzeug untersucht. Beide Systeme, Flugzeug und Bodenfahrzeug, müssen vollautomatisiert miteinander synchronisiert werden.
- Verkehrsträger: Luft
- Themenfelder: Automatisierte Verkehrsmittel, Konnektivität

Das Projekt „Systemergonomie für kooperativ interagierende Automobile“ erforscht die Nachvollziehbarkeit des Automationsverhaltens und Eingriffsmöglichkeiten des Menschen im Normalbetrieb an Systemgrenzen und bei Systemausfall.
- Verkehrsträger: Straße
- Themenfelder: Einbindung der Nutzer und Bewohner, Automatisierte Verkehrsmittel, Verkehrssicherheit

Im Rahmen des Projektes „HA‑N‑F – Hochautomatisiertes Nutzerspezifisches Fahren“ wird ein Designspace erstellt und empirisch validiert, der Eigenschaften eines Fahrers in unterschiedlichen Fahrszenarien im Hinblick auf Anforderungen an die Informationsgestaltung im Fahrzeug und akzeptanzrelevante Anforderungen der Nutzer beim hochautomatisierten Fahren miteinander in Verbindung bringt.
- Verkehrsträger: Straße
- Themenfelder: Einbindung der Nutzer und Bewohner, Automatisierte Verkehrsmittel

Im Rahmen des Vorhabens „CERMcity – Center for European Research on Mobility Urban Validation Environment“ entsteht eingebettet in das Aldenhoven Testing Center der RWTH Aachen eine für alle interessierten Nutzer zugängliche urbane Testumgebung.
- Verkehrsträger: Straße
- Themenfelder: Automatisierte Verkehrsmittel, Konnektivität, Innovative Verkehrsinfrastruktur

In dem Projekt „PARIS – PARallele Implementierungs-Strategien für das Hochautomatisierte Fahren“ soll eine neuartige parallele Prozessorplattform mit optimierten Prozessorkernen entwickelt werden. Auf dieser Plattform werden komplexe und rechenintensive Sensorfusionsalgorithmen abgebildet.
- Verkehrsträger: Straße
- Themenfelder: Automatisierte Verkehrsmittel
UNICARagil vereint die Kompetenzen führender deutscher Hochschulen im Bereich des automatisierten Fahrens und ausgewählter Industriepartner, um das Fahrzeug der Zukunft und seine Entwicklungsprozesse neu zu denken.
- Verkehrsträger: Straße
- Themenfelder: Sharing-Konzepte, Elektromobilität, Mobility on Demand, Automatisierte Verkehrsmittel, Intelligente Logistikkonzepte, Konnektivität, Innovative Verkehrsinfrastruktur, Verkehrssicherheit, Innovative Antriebskonzepte
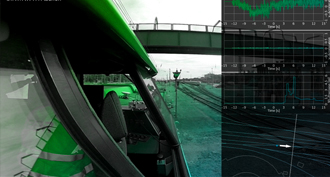
Ziel des Projekts ist die Entwicklung eines zuverlässigen und hochgenauen Galileo-Navigationsempfängers speziell für Bahnanwendungen mit integriertem Kommunikationsmodul und nahtloser Anbindung der Empfängersoftwäre und –hardware an zentrale Dienste.
- Verkehrsträger: Schiene
- Themenfelder: Automatisierte Verkehrsmittel, Konnektivität, Innovative Verkehrsinfrastruktur

Das maritime Projekts GALILEO Nautic zielt auf die Entwicklung der autonomen Navigation und das kooperative Manövrieren von Schiffen in Häfen und Hafengebieten ab.
- Verkehrsträger: Wasser
- Themenfelder: Automatisierte Verkehrsmittel, Konnektivität, Innovative Verkehrsinfrastruktur

Das Projektes „GALILEOnautic 2 – Autonomes Navigieren und optimiertes Manövrieren von kooperierenden Schiffen in sicherheitskritischen Bereichen“ verfolgt das Ziel, ein autonom agierendes Netzwerk von maritimen Verkehrsteilnehmern innerhalb einer beschränkten Hafenumgebung darzustellen.
- Verkehrsträger: Wasser
- Themenfelder: Automatisierte Verkehrsmittel, Konnektivität, Verkehrsmanagement

Ziel des Projekts „AutoKnigge – Modellierung, Bewertung und Absicherung von Verhalten für Kooperativ Interagierende Automobile“ ist es, ein adaptives Framework zur Verhaltensmodellierung kooperativer Verkehrsteilnehmer bereitzustellen sowie ein Satz von Verhaltensregeln zu erarbeiten, der als Rahmenwerk für das Verhalten kooperativer Autos dient.
- Verkehrsträger: Straße
- Themenfelder: Automatisierte Verkehrsmittel, Konnektivität, Verkehrsmanagement, Verkehrssicherheit
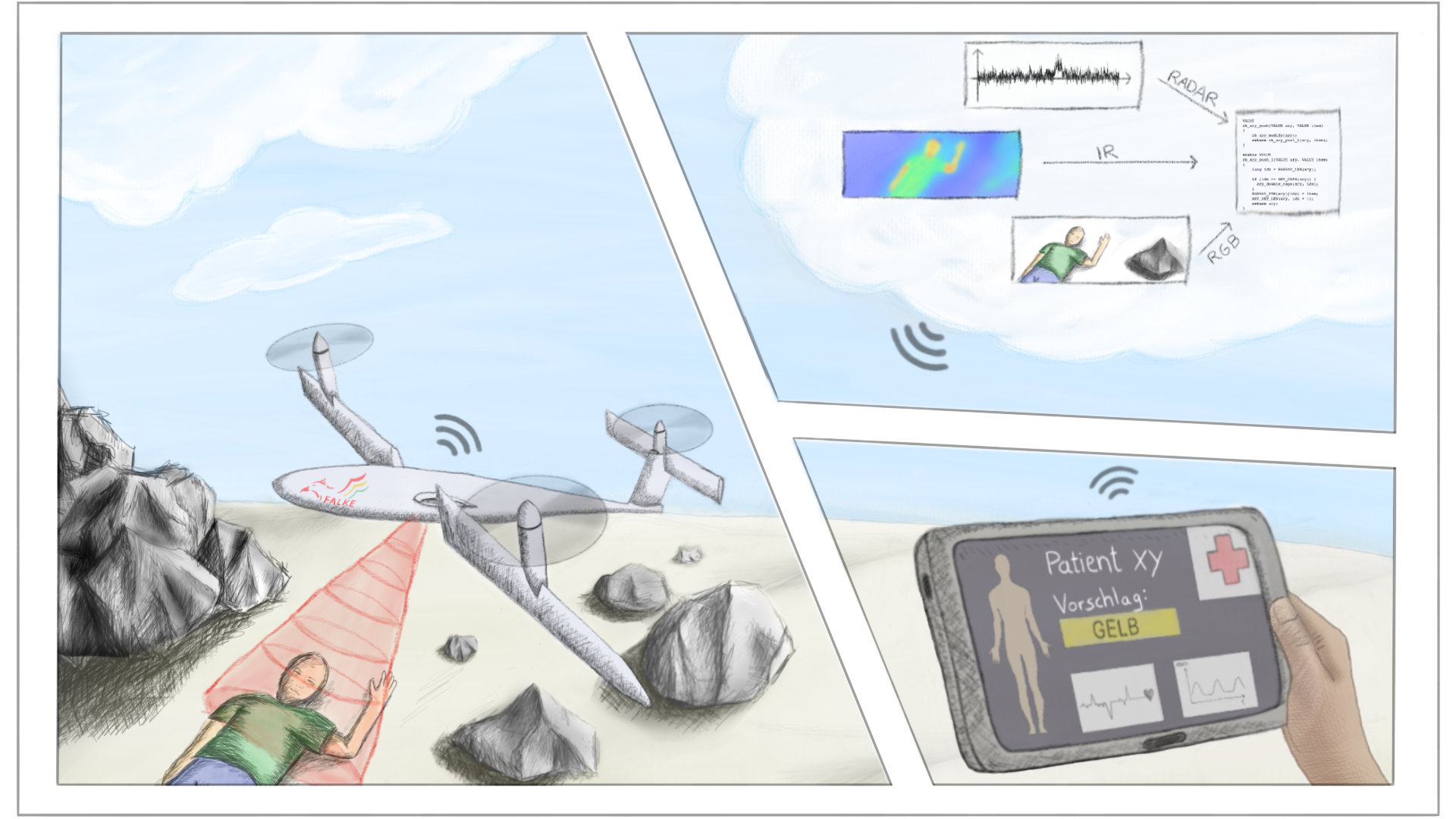
Ziel des Projekts „FALKE – Flugsystem-Assistierte Leitung Komplexer Einsatzlagen“ ist eine teilautomatisierte Sichtung von Patienten mittels kontaktloser Detektion der Vitalparameter durch verschiedene Sensoren, die an einem unbemannten Flugsystem installiert sind.
- Verkehrsträger: Luft
- Themenfelder: Automatisierte Verkehrsmittel, Mobility & Health